Inverter e motore asincrono
L’inverter fa il contrario del raddrizzatore, ossia ricava una tensione alternata a partire da una tensione continua.
L’elettronica di potenza ha reso percorribile questa strada, che è più stretta di quella del raddrizzatore perché non può essere passiva, cioè i dispositivi coinvolti devono necessariamente essere comandati, non possono essere p.es. dei diodi. Si usano all’uopo dispositivi a semiconduttore quali GTO, IGBT, IGCT, ecc., valvole estremamente compatte e potenti dalle prestazioni che fanno spavento: i dispositivi più potenti possono comandare anche 6 kV e 6 kA! E parlo di un solo esemplare di semiconduttore.
Esistono fondamentalmente due famiglie di inverter: il tipo VSI (Voltage Source Inverter) e il tipo CSI (Current Source Inverter). Nel primo la corrente non viene condizionata, il convertitore opera su tensione e frequenza. Nel secondo la tensione non viene condizionata, il convertitore opera su corrente e frequenza. Nell’industria dell’elettronica di potenza applicata al pilotaggio dei motori prevale il primo tipo, quello che regola tensione e frequenza per operare la conversione della potenza elettrica. Questo articolo si occupa quindi degli inverter VSI.
L’approssimazione della forma d’onda sinusoidale ad opera degli inverter è dovuta a una successione di impulsi di comando dei dispositivi di commutazione tali da alternare in modo opportuno intervalli di conduzione a intervalli di interdizione. Questa strategia di comando dei semiconduttori è detta modulazione e si basa spesso sulla PWM (Pulse Width Modulation) o modulazione a larghezza di impulso in cui il valor medio della grandezza sul periodo è desumibile appunto dai tempi di conduzione e interdizione dei dispositivi, sia presi singolarmente che in una loro combinazione.
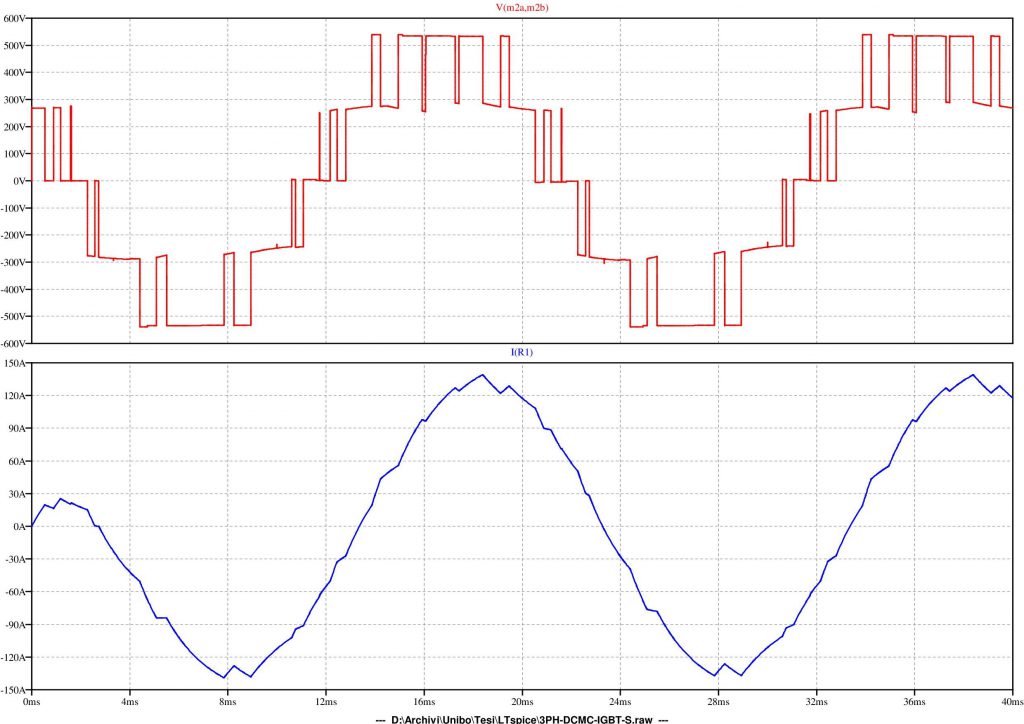
Modulazioni di più recente perfezionamento, di tipo numerico, hanno esteso e anche rivoluzionato il concetto di modulazione, la SVM per esempio (Space Vector Modulation) sfrutta un metodo geometrico di trasformazione lineare applicato ai vettori delle tensioni per determinare il corretto valore sul modello di riferimento.
Il motore asincrono trifase, già di per sé dotato di notevoli pregi quali semplicità costruttiva, elevato rendimento, massa e ingombro ridotti per unità di potenza, collegamento diretto alla rete elettrica, autoregolazione della coppia, autoavviamento, funzionamento reversibile, è stato ulteriormente valorizzato grazie all’elettronica di potenza che ha sopperito ai deficit tipici della macchina asincrona quali elevate correnti di avviamento, difficoltà nella regolazione della velocità, assorbimento di energia reattiva.
Oggi il motore asincrono trifase è il maggiore produttore di forza motrice nel mondo, ha soppiantato il motore sincrono e quello in corrente continua anche nei settori in cui l’impiego di questi ultimi era imprescindibile (applicazioni tachimetriche), questo grazie all’elettronica di potenza.
L’inverter VSI controlla sostanzialmente due parametri elettrici del motore:
- La tensione V
- La frequenza f
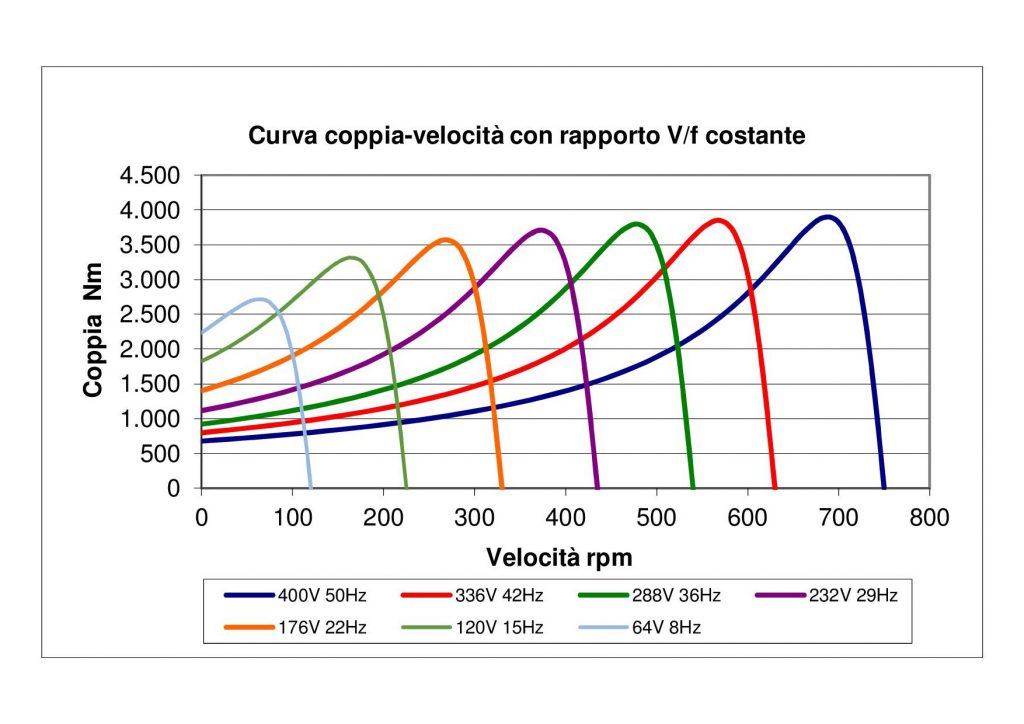
I diagrammi che seguono si riferiscono a un motore asincrono 90 kW, 8 poli, 750 rpm, 1155 Nm
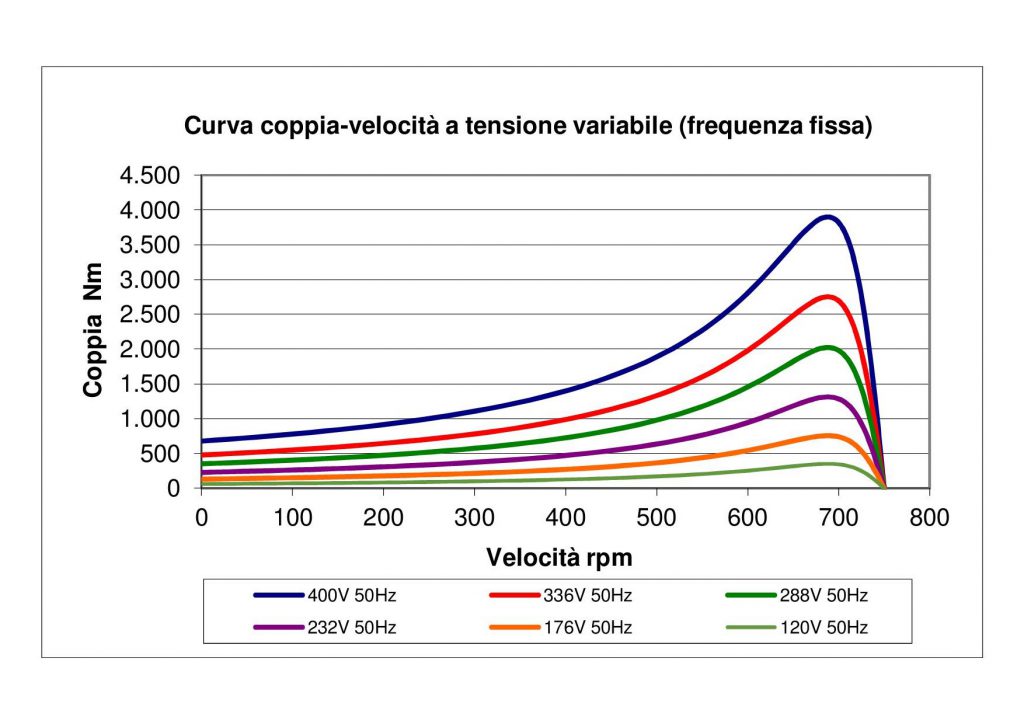
La coppia del motore è direttamente proporzionale al quadrato della tensione di alimentazione, pertanto la variazione della tensione incide pesantemente sulle prestazioni del motore.
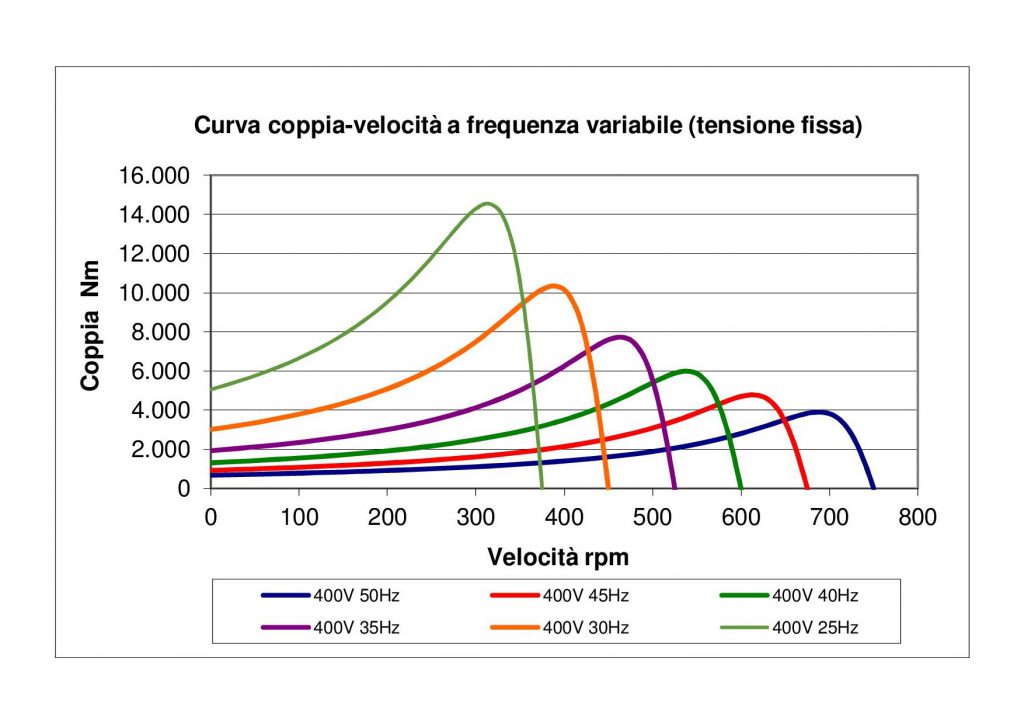
In modo del tutto speculare però la coppia del motore è inversamente proporzionale al quadrato della frequenza, pertanto anche la variazione della frequenza incide pesantemente sulle prestazioni del motore, ma in modo reciproco.
Controllando simultaneamente ambedue le variabili è possibile ottimizzare le prestazioni complessive del motore in termini di velocità, coppia e rendimento sulla scorta di una legge di proporzionalità Tensione/Frequenza (V/f). La modulazione fa tutto questo, e anche di più!